

Description: In the Standard Platform League, soccer is played with a standardized robot platform, i.e. all teams compete with identical robots and only differ in the software they developed. The robots operate in a fully autonomous way, such that there is no external control by humans or computers. However, the robots can communicate with their teammates and receive the decisions of the referee via wireless communication.
Each game is composed of two 10-minute halves. In these games, teams of five robots play against each other on a 9m x 6m field.
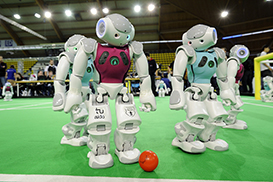
The current standard platform used is the humanoid H25 NAO or H21 NAO manufactured by Aldebaran Robotics. The H25 NAO robot has 25 actuated joints – five in each leg, five in each arm, one in each hand, two in its neck, and one in its hip. In its head, two cameras are integrated for perceiving the environment. In its chest, sonar sensors can measure distances to other object on the field. In its feet there are sensors to measure ground contact and the contact with the ball. One accelerometer with three axis and two gyroscopes each with one axis allow measuring the pose of the robot’s torso.
Rules:
http://www.robocup2016.org/en/leagues/robocup-soccer/standard-platform/