

Descrição: Na Liga de Plataformas Padrão (Standard Platform League – SPL, em inglês), o futebol é jogado com uma plataforma robótica padrão, ou seja, todas as equipas competem com robôs idênticos, que diferem apenas no software desenvolvido para estes pelas equipas. Os robôs operaram de forma totalmente autónoma, de tal modo que não existe nenhum controlo externo por humanos ou computadores. No entanto, os robôs podem comunicar com os seus companheiros de equipa e receber as decisões do árbitro através de comunicações sem fios.
Cada partida é composta por duas metades de 10 minutos. Nestes jogos, equipas de cinco robôs jogam uma contra a outra num campo de 6 m x 9 m.
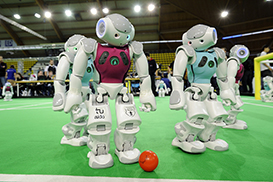
A plataforma padrão utilizada atualmente é o robô humanóide NAO H25 ou NAO H21, fabricado pela Aldebaran Robotics. O robô NAO H25 tem 25 articulações atuadas – cinco em cada perna, cinco em cada braço, uma em cada mão, duas no pescoço, e uma no quadril. Possui, na sua cabeça, duas câmaras integradas para perceber o ambiente e no peito de sensores do tipo sonar, que permitem medir distâncias para outro objeto no campo. Nos seus pés existem sensores para medir o contato com o solo e/ou contato com a bola. Um acelerômetro de três eixos e dois giroscópios (cada um com um eixo) permitem medir a postura do tronco do robô.
Regras: http://www.robocup2016.org/en/leagues/robocup-soccer/standard-platform/
Responsável: